

來自哈佛大學威斯研究所和馬薩諸塞理工學院計算機科學人工智能實驗室或麻省理工學院CSAIL的一組研究人員開發出一種機器人抓手,它使用3D打印的摺紙結構,可以提升自身重量的100倍。 使用獨特的機器人手設計,他們的機器人能夠拾取各種各樣的物體 – 例如湯罐,錘子,酒杯,無人機,甚至是單一的西蘭花小花。
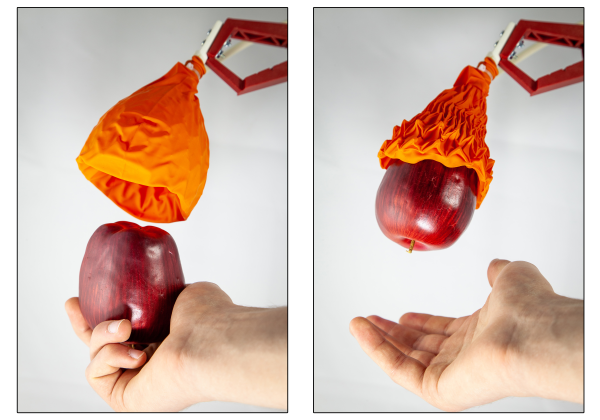
錐形,空心和真空動力設備的靈感來自“摺紙魔術球”,包括三個部分:3D打印,16片矽橡膠骨架,包裹結構的氣密皮膚,以及連接器。結構以類似於維納斯捕蠅器如何工作的方式在物體周圍坍塌:真空使俘獲器坍塌,然後在物體周圍關閉,就像一個堡壘把手一樣。柔軟的機器人抓手可以適應任何抓取的形狀,而不會影響其強度。
“這種機械手構造方法的一個關鍵特徵是它的簡單性,”哈佛大學工程學院和Wyss生物啟發工程研究所的共同作者兼教授羅伯特伍德說。 “所使用的材料和製造策略使我們能夠根據需要快速製作新的夾具原型,根據物體或環境進行定制。”
該團隊將夾具安裝在標準機器人上,以測試其在不同物體上的強度。夾具設法抓住並提升物體直徑的70%,重達120倍,而不會損壞它們。它還可以撿起重達4磅的瓶子。
根據麻省理工學院CSAIL和哈佛大學John A. Paulson工程與應用科學學院(SEAS)的聯合博士後學生李光光的說法,機器人目前最適合用於瓶子或罐子等圓柱形物體。
“像亞馬遜和JD這樣的公司希望能夠獲得更多更精緻或不規則形狀的物體,但不能使用手指式和吸盤式夾具,”李說。 “吸槃無法拾取任何帶孔的東西 – 而且它們需要的東西比柔軟的手指夾持器強得多。”
由於機器人摺紙手仍有一些局限性,因此仍有改進的餘地。根據其機制,它可能會遇到解除書籍等扁平物體的問題。在未來,該團隊希望增加一個計算機視覺系統,使抓手能夠“看到”它正在做什麼,從而可以抓住物體的特定部分。他們還計劃嘗試不同的目標物體接近角度。
“這是一個非常聰明的設備,利用3D打印,真空和軟機器人的力量來解決以全新方式抓取的問題,”加州大學機器人學助理教授Michael Wehner說。聖克魯斯說。 “在接下來的幾年裡,我可以想像看到柔軟機器人溫柔靈巧,足以挑選一朵玫瑰,但足夠強大,可以安全地抬起一名醫院病人。”
(編譯自3Deasy-pitnt.com)如有轉載請列明